1.
¿Qué es un motorreductor?
Es un conjunto de engranes que
van acoplados a la flecha de un motor eléctrico y sirve para reducir el número
de rpm del motor pero a una velocidad constante.
Componentes de un Motorreductor

2.
1. ¿Qué es un Puente H?
Un Puente en H es un circuito electrónico que permite a un motor eléctrico girar en ambos sentidos. Son ampliamente usados en robótica.
¿ ¿Cómo funciona un Puente H?
Un puente H se tiene 4 interruptores. Cuando los interruptores
S1 y S4 están cerrados (S2 y S3 abiertos) se aplica una tensión positiva en el
motor, haciéndolo girar en un sentido. Abriendo los interruptores S1 y S4
(cerrando S2 y S3), el voltaje se invierte, permitiendo el giro en sentido
inverso del motor

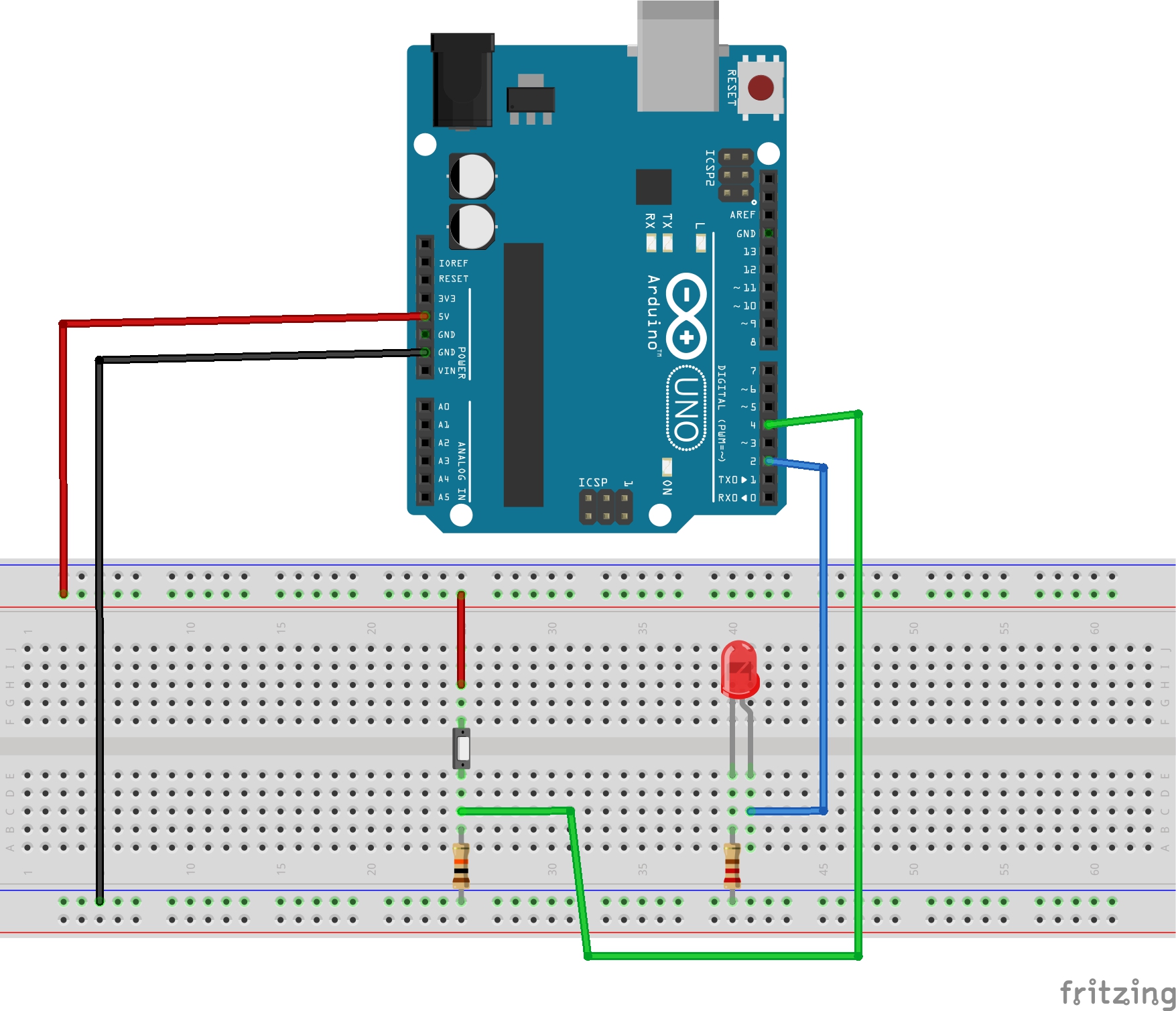
¿Cómo conectar un Puente H?

¿Cómo conectar un puente H al arduino y motor (motorreductor)?
.
¿

La Práctica
Materiales:
Arduino Uno
Moto reductor
Puente H
Batería 6v-12v
2 Cables macho-hembra
3 cables Macho-macho
Destornillador
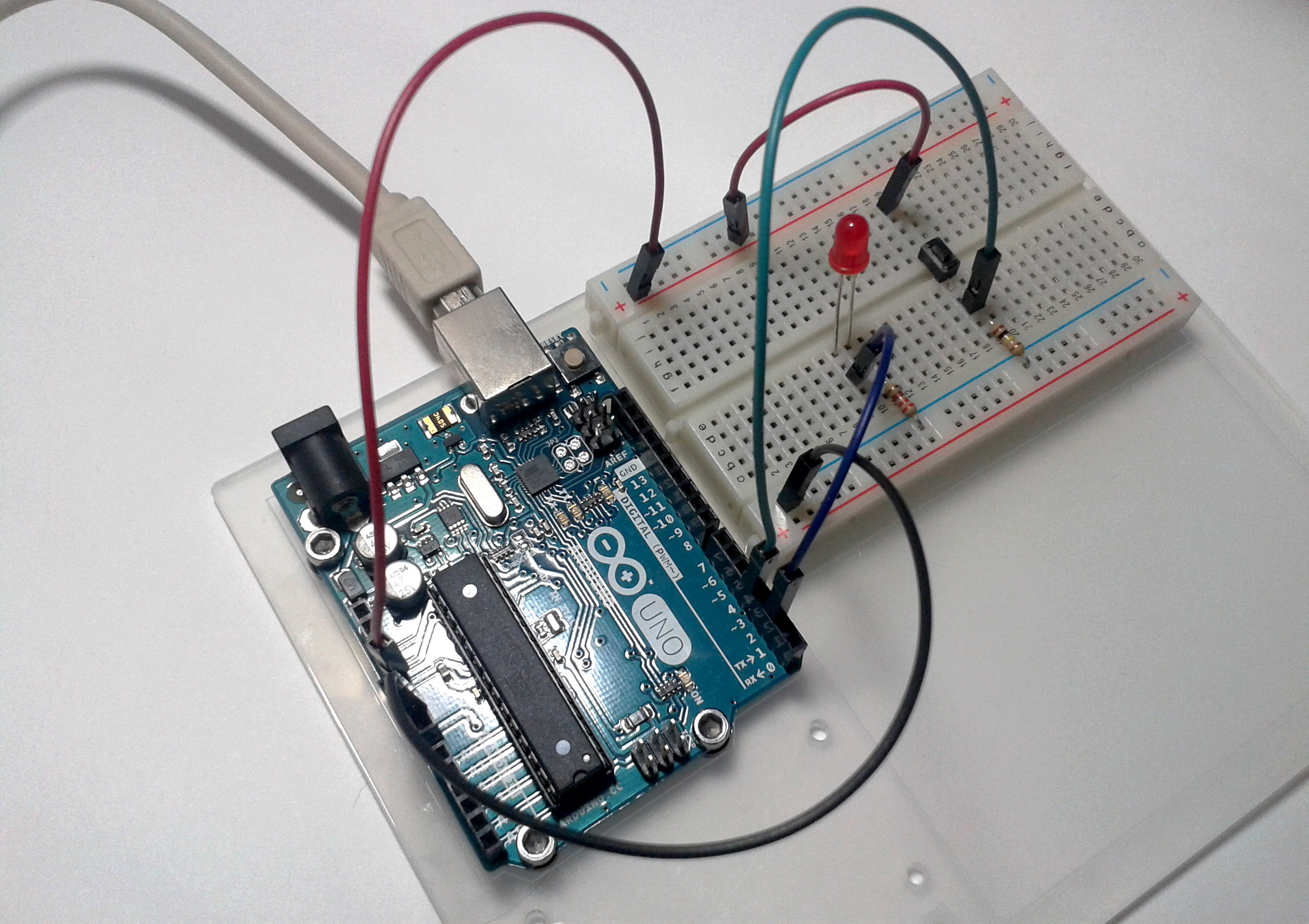
Mi conexión del Puente H, Arduino y Motorreductor

Código Utilizado
int IN3 = 5, int IN4 = 4;
void setup() {
pin Mode (IN4,OUTPUT);
pinMode (IN3, OUTPUT);
}
void loop() {
digitalWrite (IN4, HIGH);
digitalWrite (IN3, LOW);
delay (4000);
digitalWrite (IN4, LOW);
delay (500);
digitalWrite (IN3, HIGH);
delay(4000);
digitalWrite (IN3, LOW);
delay(5000);
}